Digitus
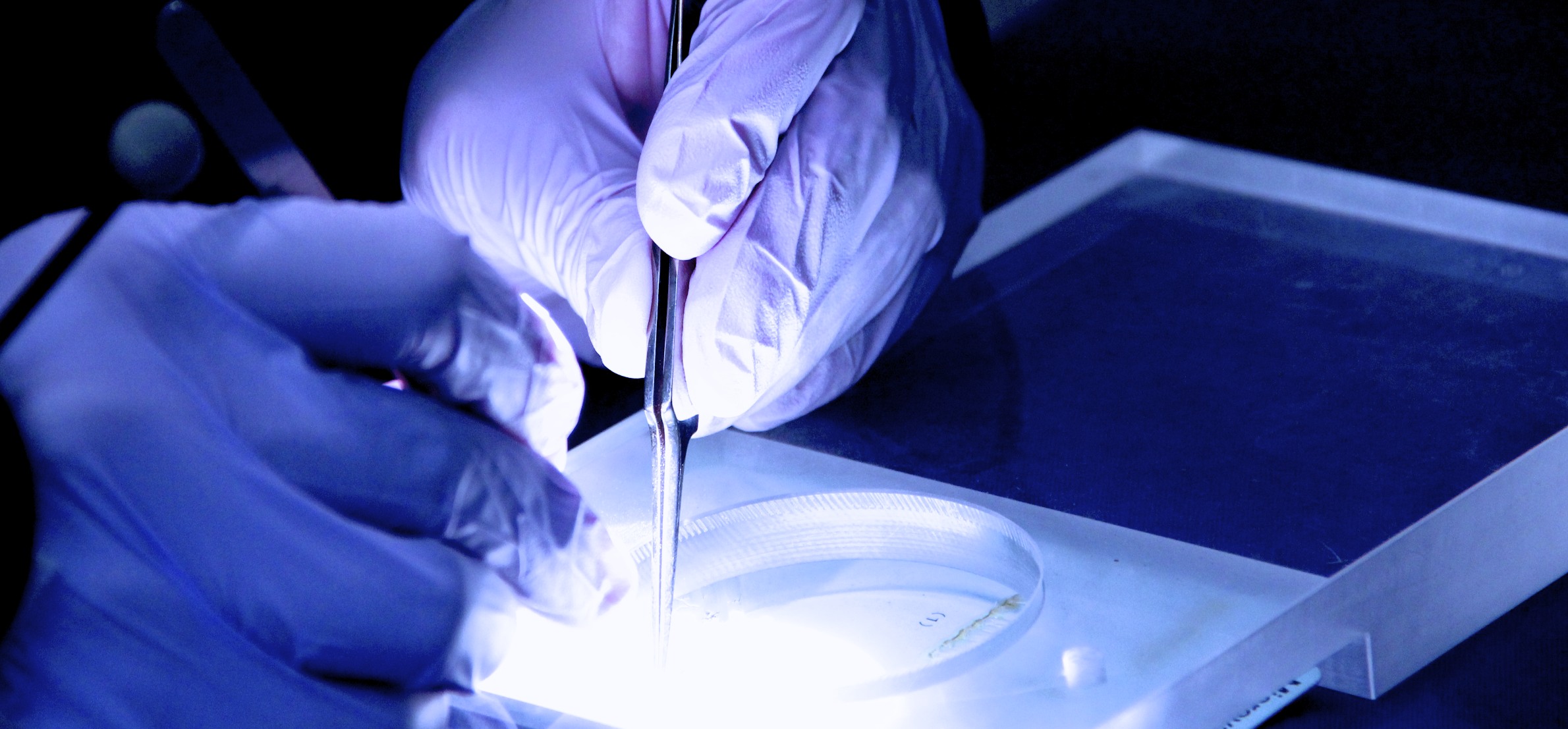

Haptic Augmentation of Surgical Operation
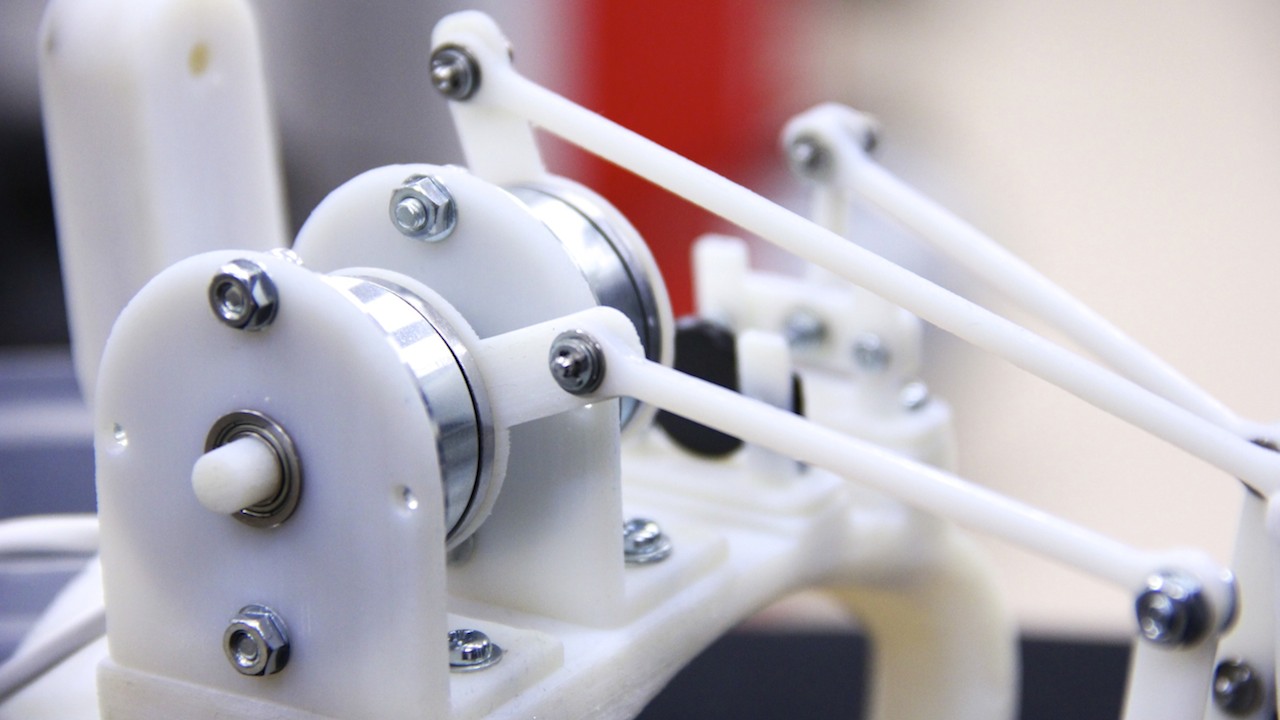
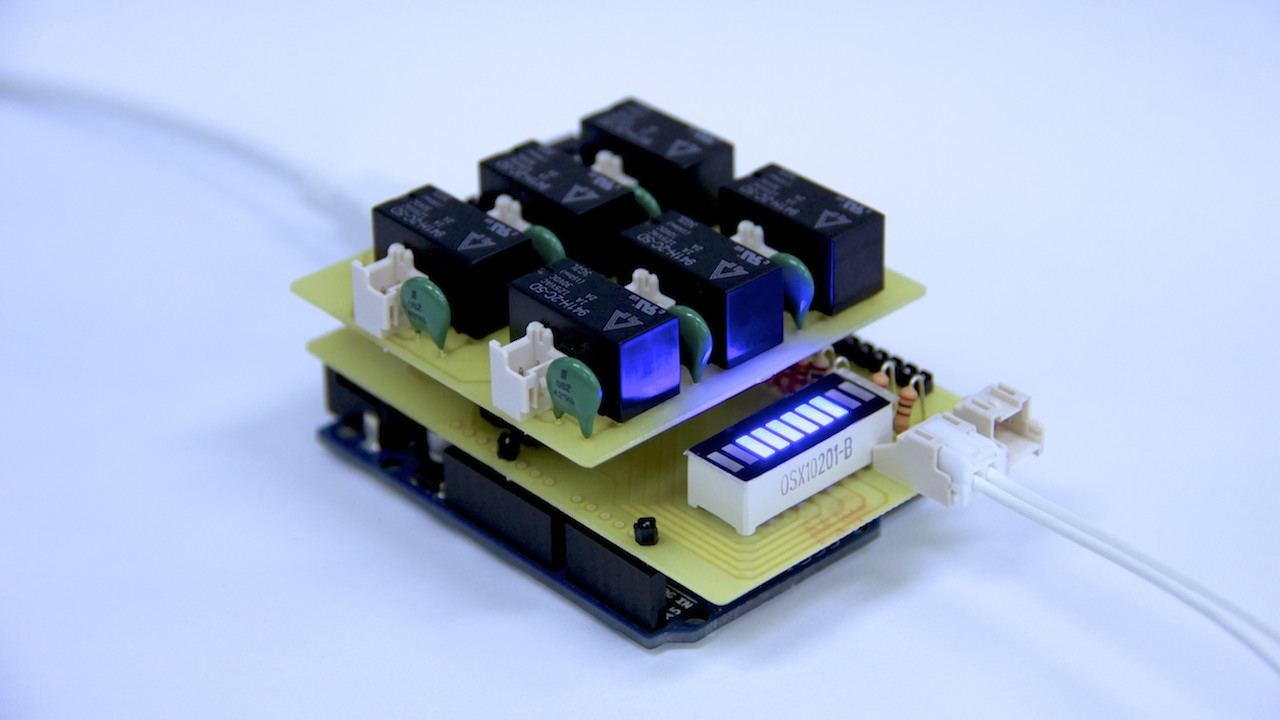
This study proposes a haptic augmentation method for surgical operations using a passive hand exoskeleton and a 4DOF link arm. The enhancements aim to allow neurosurgeons to surgerize cephalic area precisely by improving their finger movement capability. The hand exoskeleton has multiple quadric crank mechanisms with torque dampers to increase motion resolution and decrease hand tremors. The dampers are passively actuated by the action of the user. The voluntary movement of the surgeon’s fingers will not be obstructed and safety would be increased. The link arm has electromagnetic brakes in each joint and is capable of supporting a surgeon’s upper limb. In this paper, the development and assessment of the exoskeleton and link arm are described.
Publications
Jun Nishida, Kei Nakai, Akira Matsushita, and Kenji Suzuki, “Haptic Augmentation of Surgical Operation using a Passive Hand Exoskeleton”, Asia Haptics, Tsukuba, Nov. 18-20, 2014
西田 惇, 鈴木 健嗣, “脳神経外科における装着型手術手技支援機器の開発”, ロボティクス・メカトロニクス講演会2014 in Toyama, May 25-29, 2014